[ad_1]

Componentes y Suministros
 |
|
× | 1 | |||
 |
|
× | 1 | |||
 |
|
× | 1 | |||
 |
|
× | 1 | |||
 |
|
× | 1 | |||
|
× | 1 |
Herramientas y máquinas necesarias.
 |
|
|||
 |
|
Acerca de este proyecto
Este es un sensor de estacionamiento en el garaje que utiliza LED RGB direccionables para proporcionar información al conductor del vehículo a medida que se acerca y finalmente llega a la posición de parada (estacionamiento). Vea el video en acción:
Diseñé esto alrededor de un material acrílico semicircular de 1/2″ de diámetro que tenía a mano (cortado a 20-7/16″ de largo) para usarlo como una lente que también sirve para mantener unidas las secciones de cola de milano. Esto se puede comprar fácilmente en Internet por alrededor de $ 0,66 por pie, sin embargo, también he incluido un modelo de lente que se puede imprimir en segmentos usando filamento transparente.
ETAPA 1
Prepare la tira de LED (WS2812b tira de LED de píxel inteligente RGB direccionable individualmente de 30 LED de 1 metro de largo). Corte la tira en dos (2) segmentos de 15 LED y suelde los cables a cada segmento al comienzo de cada tira. Las flechas en la cinta señalan ‘LEJOS’ de donde se necesitan los cables.
2DO PASO
Ensamble todas las secciones del riel (un riel exterior y dos segmentos del riel interior en cada lado) con la caja en el medio.
PASO 3
Inserte los cables de las tiras de LED en la carcasa de cada lado y péguelos con cinta adhesiva. Nota Las tiras de LED se detendrán aproximadamente a 1/2″ de cada extremo del riel exterior
PASO 4
Deslice la lente en cada extremo hasta el fondo de la caja para bloquear todas las colas de milano en su lugar. Si está utilizando una lente impresa, se necesitarán 4 para cada lado. Están destinados a rellenar áreas de cola de milano.
PASO 5
Monte el conjunto con las tapas de los extremos en una tabla de respaldo (utilicé MDF de 1/2″ que se cortó a 2″ de ancho por 45-1/8″ de largo). Fije el conjunto con tornillos pequeños de cabeza troncocónica o de cabeza plana ( nota: no use cabeza redonda, de lo contrario, el cable USB no encajará en la ranura más adelante si es necesario reprogramar la configuración).
PASO 6
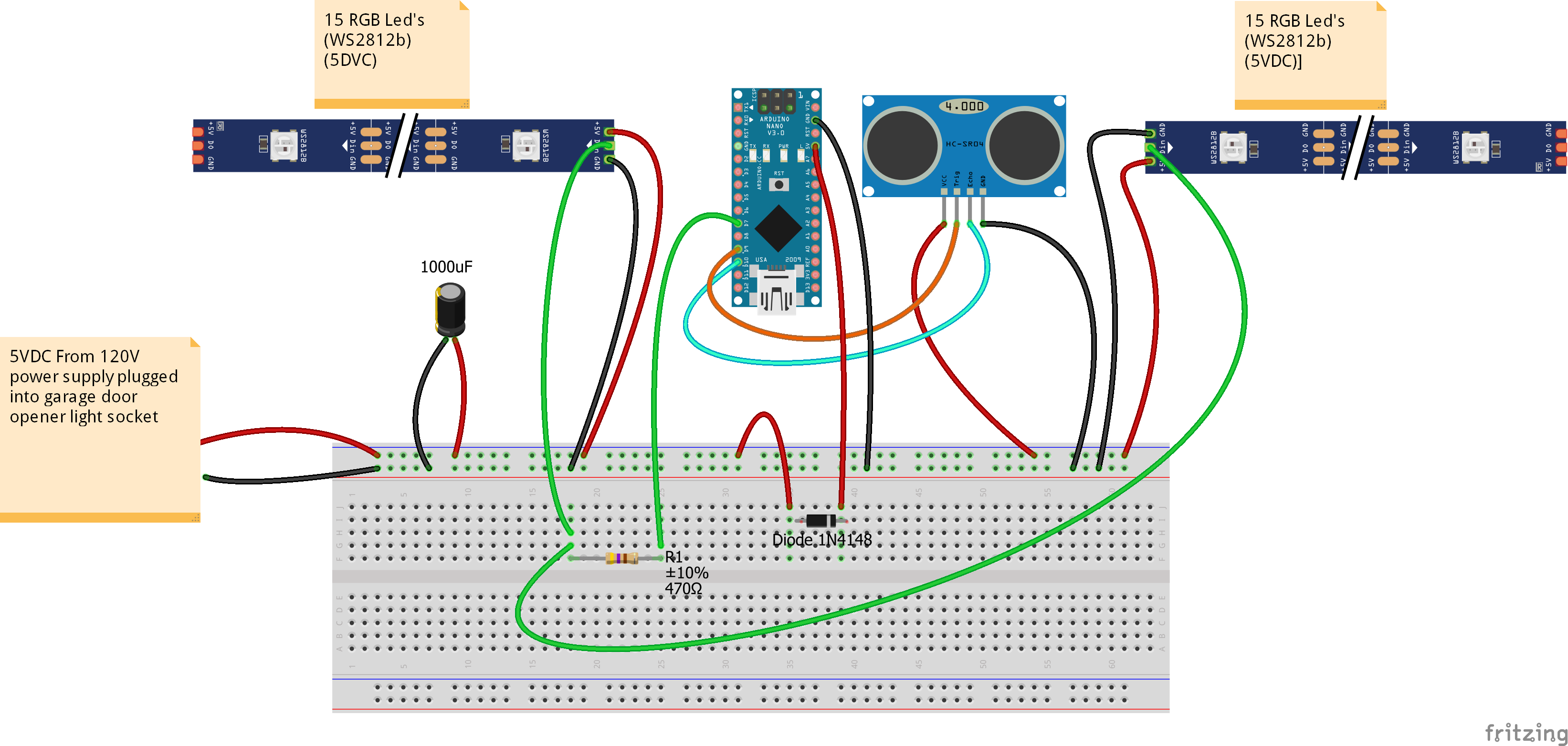
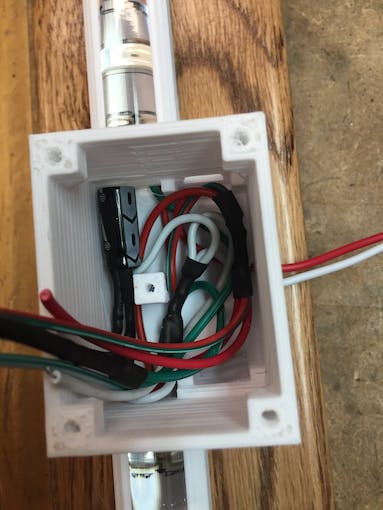
Cablea la electrónica. Tenga en cuenta la ubicación del condensador. Se requiere un condensador para evitar picos de voltaje de la fuente de alimentación. Se usa una resistencia en el cable de señal (pin 7) para los LED, y se usa un diodo en el Arduino (V+) para evitar la retroalimentación de voltaje en caso de que el USB se inserte sin la fuente de alimentación. Sin el diodo, Arduino intentará suministrar voltaje a los LED, lo que provocará una corriente excesiva a través del voltaje integrado regulado. El diodo y la resistencia se sueldan en línea con el cableado y se cubren con un tubo termorretráctil. La carcasa deberá perforarse desde el exterior cerca de la parte inferior debajo de Arduino para alimentar los cables de la fuente de alimentación. No diseñé esto en el patrón, ya que el tamaño dependerá del tipo de hilo utilizado. Recomiendo usar hilo 18/2. Usé un cable de campana y puse un conector justo fuera de la caja.
PASO 7
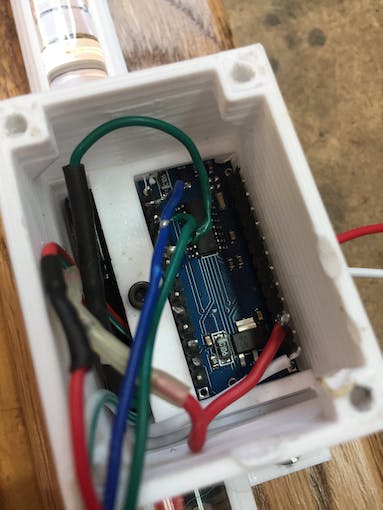
Utilice un tornillo de 2,5 mm para sujetar el Arduino y realice las conexiones de cableado al Arduino. Los extremos de retención sobresalen en agujeros cuadrados en la carcasa. Quité los pines más externos de Arduino (sin usar) para facilitar la instalación.
PASO 8
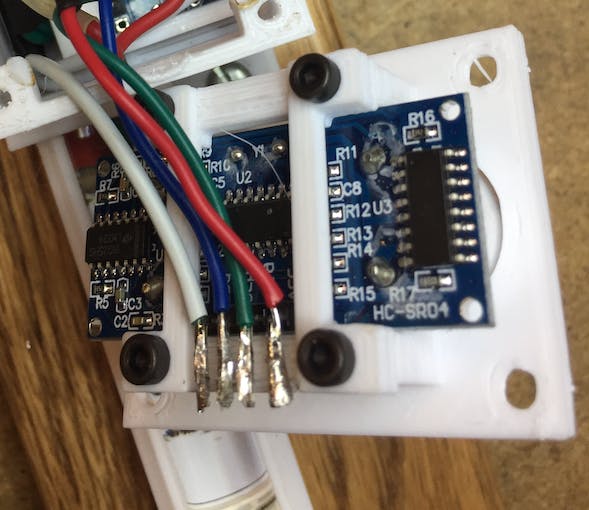
Utilice tornillos de 2,5 mm para asegurar el sensor ultrasónico (HC-SR02) a la cubierta con sujeción. Complete las conexiones de soldadura al sensor. NOTA: Asegúrese de que los cables estén orientados hacia el centro del sensor para que no interfieran con la pared lateral durante el montaje.
PASO 9
Instale la cubierta a la caja con tornillos de 3 mm.
PASO 10
Programa Arduino usando el siguiente código. Actualice sus bibliotecas IDE con ‘FastLED’ y ‘QuickStats’ antes de compilar su programa. Nota: Establezca los parámetros para la «distancia de inicio» (punto en el que el sensor detectará por primera vez la aproximación del vehículo), así como la «distancia de parada» (punto de estacionamiento final del vehículo). El rango del sensor es 3 cm a 400 cm, por lo que los parámetros de inicio y parada deben estar entre estos límites.
PASO 11
En el abridor de puerta de garaje, instale un adaptador de portalámparas con enchufe incorporado. Enchufe su fuente de alimentación de 5 V CC en esta línea y diríjase a la barra de luces. La barra de luces solo se enciende desde el momento en que se abre la puerta hasta que se apaga la luz de la puerta. Esto evita que la barra de luces esté siempre encendida.
codificado
Partes y estuches personalizados
diagramas