Cómo hacer una mano robótica a control remoto con Arduino © GPL3+
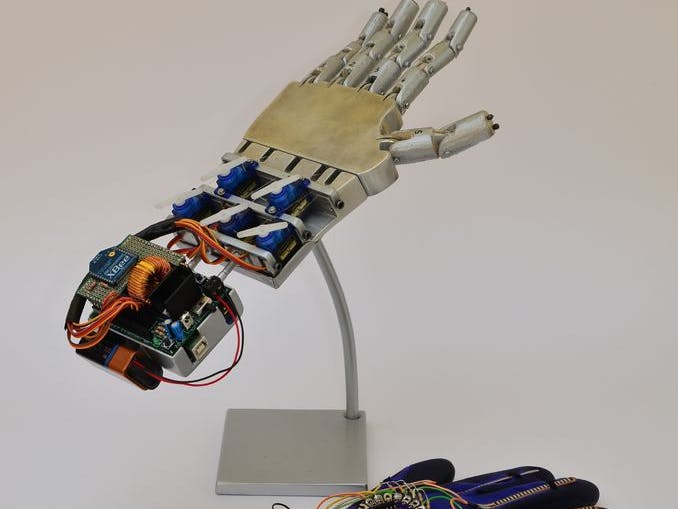
Cómo hacer una mano robótica a control remoto con Arduino © GPL3+ Una mano robótica que emula el movimiento de tu mano de forma inalámbrica a través de un guante con sensores. Componentes y Suministros Arduino UNO ×…